特徵點
如何「描述」特徵
如何「比對」描述符
「點對」如何產生
程流
BRIEF的問題
實際應用
此篇文章主要是介紹BRIEF這個算法,
如要了解完整的內容請參閱:
BRIEF: Binary Robust Independent Elementary Features (conference)
BRIEF: Binary Robust Independent Elementary Features (conference)
BRIEF:Computing a Local Binary Descriptor Very Fast (journal)
此兩篇文章。
特徵點
在影像處理中,常會需要取得特徵來進行更多的處理,
但到底什麼是一張圖中的特徵呢?
利用以下的圖來稍為做一下介紹
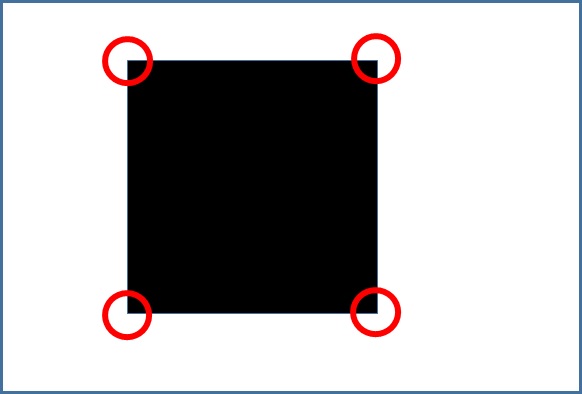
圖中的紅色圈圈即為特徵點,
這些點不就是角點嗎?
沒錯!通常的情況下影像的特徵點 = 角點,
這是因為角點更能表示其圖形的特徵,
且不受縮放的影響,
像一個五角形的圖形,
人們更會注意到他有5個角,而不是10個邊。
如何「描述」特徵
知道了特徵點後,
要如何分辨出不同的特徵點,
成了另一個問題,
如上圖中的4個角點,
我們知道這4個角點是不同的,
但我們要用什麼樣的方式去「描述」,
才能讓電腦分辨出這4個角點的不同?
然而特徵點又不是只有這4種,
以下的圖都可能為一個特徵點,
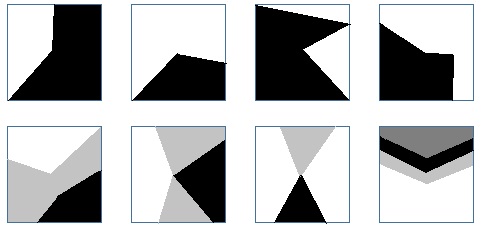
除了我們認知的一般角點以外,
也可能會有漸層式的特徵點,
或是其它不同類型的角點,
當然有些例子可能太過誇張,
這邊想表達的是,
特徵點雖然等於角點,
但並不是只有方方正正的角才是特徵點,
所以該有效的描述特徵點,
才能讓不同的特徵點有不同的特徵值,
則是此文章主要探討的問題,
這部份有非常多的方式,
此文章只針對BRIEF做說明,
-
首先取得特徵點周圍s*s個點(BRIEF中取7*7)為其描述範圍
-
利用「點對」進行描述
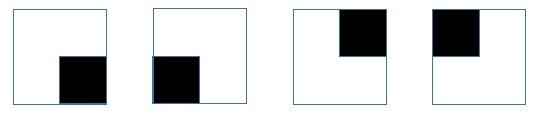
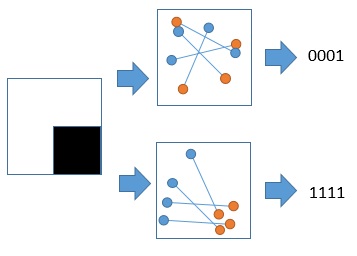
首先假定有4個「點對」如下:
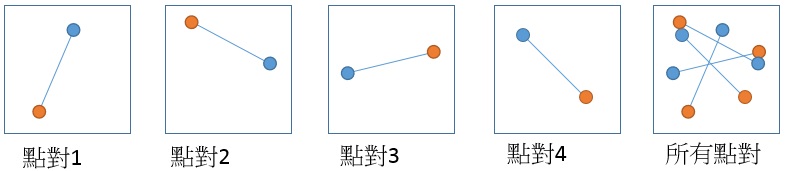
每個「點對」存有「兩個位置」(藍色點和橘色點),
BRIEF則利用兩個位置其像素值之比較來進行特徵描述,
描述的方式如下:
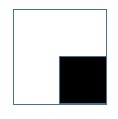
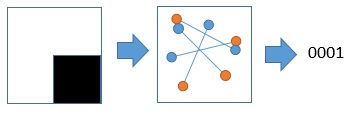
當「橘色點的像素值 < 藍色點的像素值」為1,否則為0(白色點為255,黑色點為0)
將「點對」套用到上面的4個特徵點的結果如下:
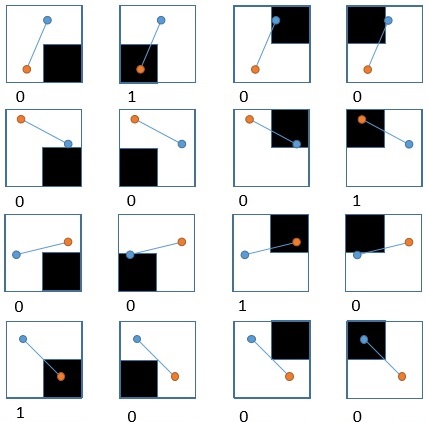
再將所有的點對結果組成一個二元字串
如此,就可藉由產生的二元字串來分辨不同的特徵點
如何「比對」描述符
產生了二元字串之後,
我們也能藉由二組二元字串的比對來得知兩個特徵點是否相似,
而比對的方式則是先將兩組二元字串做xor運算,
再計算共有幾個bit的值為1,如:
第一組二元字串 = 1001,
第二組二元字串 = 1101,
xor的結果 = 0100,
bit為1的數量 = 1;
第一組二元字串 = 1101,
第二組二元字串 = 0011,
xor的結果 = 1110,
bit為1的數量 = 3;
如果bit為1的數量越小,
代表兩個特徵越相似,
反之越不相似。
「點對」如何產生
了解了整個描述的方式,
但這之中卻還有另一個問題,
「點對」是如何產生的?
在BRIEF中共提出了5種方式來產生點對,
當然這5種方式都是利用隨機產生,
只是利用不同的機率分佈進行隨機產生的方式,
以下(x,y分別代表藍色點及橘色點的位置)
以下(x,y分別代表藍色點及橘色點的位置)
-

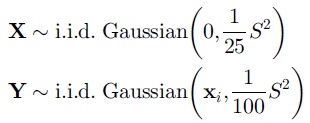
x,y分別在同一個均勻分佈下進行隨機採樣
-

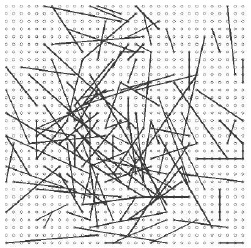
x,y分別在同一個高斯分佈下進行隨機採樣
-
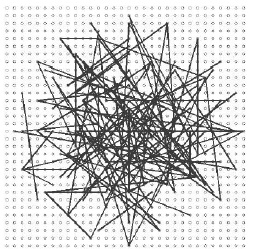
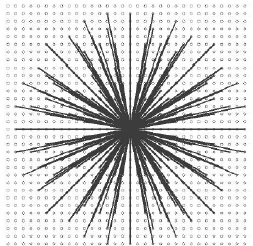
x在一個高斯分佈下進行採樣,y則以x為中心點在另一個高斯分佈下進行隨機採樣
-
利用極座標(theta, distance)的方式來隨機採樣
-
x固定為中心點,y則是極座標上所有可能的點
BRIEF中分別利用此5種規則去產生「點對」,
並且利用實驗的方式來了解哪一種方式產生的「點對」較好,
從實驗結果來看前4種各有好壞,而BRIEF是推薦使用第2種,
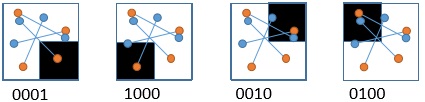
再者,雖然「點對」是隨機產生的,
但在產生第一次以後點對則是固定,
例如,我們先隨機產生「點對集」如下,

對於每個角點的描述都要使用同樣的「點對集」,
對於每個角點的描述都要使用同樣的「點對集」,
如果我們利不同的「點對集」則無法有效的分辨各個特徵點,
因為他們取得到的二元字串是不同的,如:
程流
最後讓我們統整一下整個BRIEF的流程
-
利用隨機分佈產生「點對集」

-
取得角點周圍s*s個點
-
利用「點對集」取得二元字串
- 匹配二元字串,利用兩個二元字串做xor運算後,bit為1的數量
BRIEF的問題
BRIEF存在幾個問題,這邊只稍為介紹,
-
利用單個pixel進行比較,抗noise能力不好
論文中也提到可以先對影像進行smooth再取得pixel value
-
不具縮放及旋轉不變性
對於同樣的特徵點,如果進行30度的旋轉,
得到的二元字串將會不同,
當然如果特徵點被縮放過也會得到不同的二元字串。
實際應用
這部份也不知該從何講起…
還是直接用圖來說明吧…
假設我有一個樣板

以及一個要檢測的影像

利用匹配我們能找到兩張影像中,
哪些特徵點是相似的
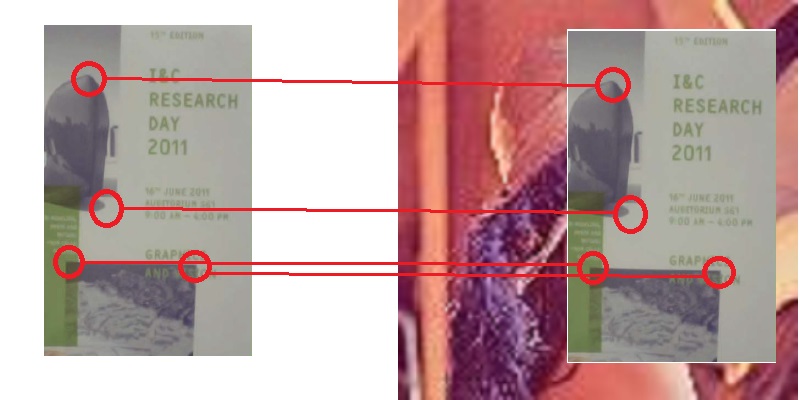
如此,便能找到樣板在該影像的位置,
當然還有其它更多的應用,這邊只是舉例一個來說明。
新手發文如有錯誤,煩請指正!